 Is your tiny robot really all that small if it's bigger than the width of a coin? A group of scientists has created the world's tiniest remote-controlled walking robot, measuring about half a millimeter (less than a tenth of an inch) broad.
Is your tiny robot really all that small if it's bigger than the width of a coin? A group of scientists has created the world's tiniest remote-controlled walking robot, measuring about half a millimeter (less than a tenth of an inch) broad.
Extremely small robots might be used for a variety of tasks, from assisting with surgical operations to fixing machinery in tight locations where a wrench won't fit. They may be employed in more contexts as they become smaller.
While this bot is not yet ready to go out into the public and do repairs, it is extremely remarkable.
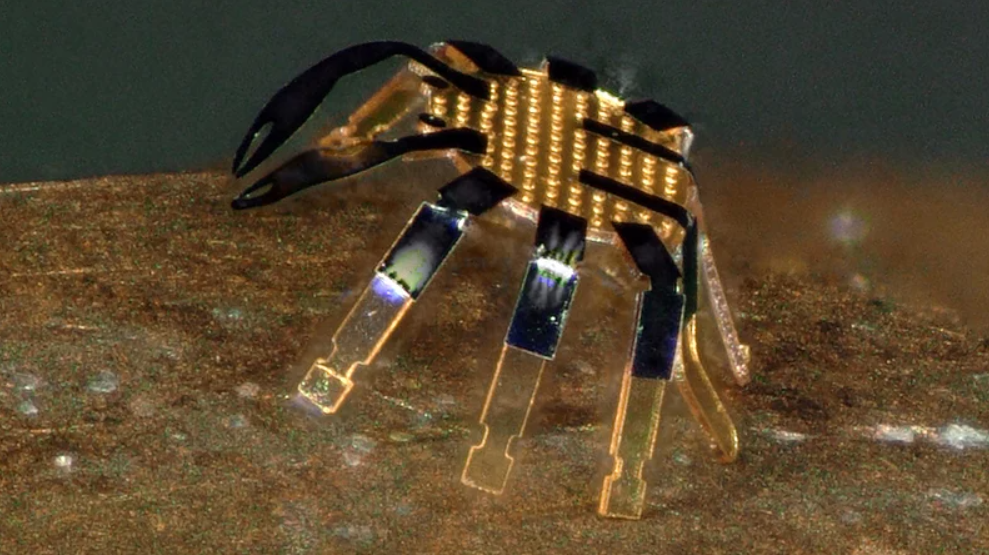
According to the researchers, it has the appearance and movement of a small peekytoe crab, a form chosen on a "creative whim." In fact, the tools they've created can be used to create small robots in almost any shape.
"Our technology enables a variety of controlled motion modalities and can walk with an average speed of half its body length per second," explains Northwestern University mechanical engineer Yonggang Huang.
"This is very challenging to achieve at such small scales for terrestrial robots."
The robot's technique is similar to that of a pop-up book: robot elements are connected to a stretched rubber substrate, and when the material is relaxed, the gadget pops up into its shape.
By carefully calibrating the base pieces, the robot shape can be precisely controlled. The robot's moving parts, which are composed of a shape-memory alloy material, take a similar method. Depending on whether or not they are heated, these materials fluctuate between two distinct forms.
Lasers are utilized as a remote control to heat certain portions of the robot, which then morph into a new shape, propelling the crab onward. There's no need for a power source or an engine, and the components cool to their original form thanks to a thin glass layer.
"Because these structures are so tiny, the rate of cooling is very fast," explains Northwestern University materials scientist John Rogers. "In fact, reducing the sizes of these robots allows them to run faster."
The researchers can control the mobility of the robo-crab by directing lasers at different parts of the robo-crab. The pace of the robot's movement may be altered by modifying the frequency of the laser scanning.
This is the next stage in a trend that has seen robots shrinking in size over time, whether it's to make them more resistant to external forces, to target medications to treat diseases, or to create larger, modular structures from smaller pieces.
The researchers claim that their new method has a lot of potential: they can use the same tactics to induce robots to turn and leap, for example. The robot may be controlled remotely as long as it is within line of sight of the laser.
"Robotics is an exciting field of research, and the development of microscale robots is a fun topic for academic exploration," Rogers adds.
"You might imagine micro-robots as agents to repair or assemble small structures or machines in industry or as surgical assistants to clear clogged arteries, to stop internal bleeding or to eliminate cancerous tumors – all in minimally invasive procedures."